Как работает Левитрон?
Теперь, когда вы заинтересовались левитацией, создав или купив свой первый Левитрон, вам осталось только освоить искусство запуска, мы поможем вам в этом, рассмотрев принцип действия. И научим вас искусству запуска Левитрона, расскав о секретах и тонкостях этой технологии.
Овладеть искусством запуска волчка и помещения его в позицию стабильной левитации, вы и окружающие, гарантированно ощутите полное изумление. Сегодня левитация волнует многих людей. Мы получаем многочисленные запросы от клиентов, с вопросами по левитации и объяснения того, как работает левитрон.
Многие экспресс озадаченность, что он работает на всех, часто ссылаясь на теорему, принадлежащую Эрншоу (1,2), как доказательство того, что он не должен работать. Интерес к левитрон имеет всегда кипят среди ученых. в последнее время аналогий левитрон ловушкам для микроскопических частиц (например, электронов, нейтронов) были признаны учеными, работающими в увлекательной области исследований, где материя манипулируют и исследуют, одну такую микроскопическую частицу в то время, . Первый признать аналогию, был доктор Майкл В. Берри из университета Бристоля. Д-р Берри, вдохновленный этим признанием, опубликовал подробное изложение физики функционирования левитрон (в 3). бумага доктора Берри является одним из лучших существующих объяснение того, как работает Левитрон и он любезно приготовил для нас краткую инкапсуляцию основных тем, которые мы представляем ниже. Те, кто желает, чтобы прочитать полную экспозицию следует запросить копию бумаги от доктора Берри.
Что его держит?
"Антигравитация", - это сила, которая отталкивает вершины от основания магнетизм. И верх и тяжелая горбыль внутри базовой коробки намагничиваются, но противоположно. Подумайте основного магнита с его северным полюсом направлен вверх, а сверху, как магнит с его северный полюс направлен вниз (рис.1). Принцип заключается в том, что два одинаковых полюса (например, два Norths) отталкиваются и что два противоположных полюса притягиваются, с силами, которые сильнее, когда полюса ближе. Есть четыре магнитных сил на вершине: на ее северном полюсе, отталкивание с севера в базу и притяжения с юга базу, а также на его южном полюсе, притяжение с севера для базы и отталкивания с юга базы. Из-за способа силы зависят от расстояния, к северо-северо отталкивание доминирует, а верхняя магнитно отталкиваются. Он висит где это вверх отталкивание уравновешивает вниз сила тяжести, то есть в точке равновесия, где суммарная сила равна нулю.
Почему Левитрону нужно вращаться?
Чтобы предотвратить опрокидывание вершины. Помимо обеспечения силы на вершине в целом, магнитное поле базы дает крутящий момент, стремящийся повернуть его ось вращения. Если верхняя не спиннинг, этот магнитный вращающий момент будет перевернуть его. Затем ее южный полюс будет направлена вниз, и сила от основания будет привлекательным, - то есть, в том же направлении, что и силы тяжести - и вершина будет падать. Когда верхний вращается, крутящий момент действует гироскопически и ось не опрокинуть, но вращается вокруг (почти вертикально) направление магнитного поля. Это вращение называется прецессией (рис.2). С Левитроном, ось почти вертикально и прецессии видно, как дрожь, которая получает более произносит как топ замедляется. Эффективность спина в стабилизации магнитно поддерживается вершины, такие как Левитрон был обнаружен Рой М. Harrigan (4).
Почему Левитрон не скользит боком?
Для верхней она остается подвешенной, в одиночку равновесия недостаточно. Равновесие также должна быть стабильной, так что небольшое горизонтальное или вертикальное перемещение производит силой, толкающей вверх назад к точке равновесия. Для Левитрона, стабильности трудно достичь. Это зависит от того факта, что, как вершина перемещается в сторону, в сторону от оси основного магнита, магнитное поле базы, о которой ось волчка прецессировала, слегка отклоняется от вертикали (рис. 2). Если верхний прецессировала о точной вертикали, физика магнитных полей сделало бы равновесие неустойчиво. Поскольку поле настолько близко к вертикали, равновесие устойчиво только в небольшом диапазоне высот - от примерно 1,25 дюйма до 1,75 дюйма выше центра основания. (от 2,5 до 3,0 дюйма для увлечениях "нового Супер Левитрон). Теорема Эрншоу не нарушается поведение Левитрон. Эта теорема утверждает, что никакие статические расположения магнитных (или электрических) зарядов не может быть стабильным, в одиночку или под действием силы тяжести. Это не относится к Левитрон, потому что магнит (в верхней части) крутится и так динамически реагирует на поле от основания.
Почему вес Левитрона важен (и почему он должен быть отрегулирован)?
Вес верхней и силы намагничивания базы и верхний определяют высоту равновесия, где магнетизм уравновешивает силу тяжести. Эта высота должна находиться в стабильном диапазоне. Небольшие изменения температуры изменяет намагниченность базы и сверху. (При повышении температуры, направления атомных магнитов рандомизации и поле ослабевает). Если вес не корректируется, чтобы компенсировать, равновесие будет выходить за пределы диапазона стабильной и вершина будет падать. Так как стабильный диапазон настолько мал, эта регулировка деликатная - самый легкий шайба составляет лишь около 0,3% от веса верхней части.
Почему в конце концов Левитрон падает?
Верхний раскручивает стабилен в диапазоне приблизительно от 20 до 35 оборотов в секунду (RPS). Это совершенно неустойчив выше 35-40 RPS и ниже 18 оборотов в секунду. После того, как вершина прядут и левитировать, это замедляет из-за сопротивления воздуха. Через несколько минут она достигнет нижнего предела устойчивости (18 RPS) и падает. Спин время жизни Левитрон может быть расширен путем помещения его в вакууме. В течение нескольких вакуумных экспериментов, которые были сделаны верхней упала примерно через 30 минут. Почему он делает это не ясно; может быть, при изменении температуры, толкая равновесия из стабильного диапазона; может быть, есть некоторые крошечные остаточные долгосрочной нестабильности, потому что вершина не вращается достаточно быстро; или, возможно, вибрации вакуумного оборудования пробежку поле и постепенно привод оси прецессии от направления магнитного поля. Левитации может быть значительно продлен путем продувки воздуха с соответствующим воздушным зубчатый воротник, расположенных вокруг периферии волчка, с тем, чтобы поддерживать частоту спинов в стабильном диапазоне. В последнее время топ Левитрон хранилась вращающаяся в течение нескольких дней таким образом. Но наиболее успешным средством для продления левитации волчка является новым, электромагнитный импульсный прибор, который может держать верхнюю левитировать в течение многих дней или даже недель.
Как используется принцип Левитрона?
В последние десятилетия, микроскопические частицы изучались захвата их с магнитных и / или электрических полей. Есть несколько видов ловушек. Например, нейтроны могут быть проведены в магнитном поле, создаваемом системой катушек. Нейтроны вращающихся магнитных частиц, поэтому аналогия такой нейтронной ловушки с Левитрон близко.
В некоторых продвинутых магазинах можно увидеть стенды с рекламой, на которых показываются интереснейшие эффекты, когда какая-то вещь с витрины или предмет с изображением бренда левитирует. Иногда добавляется вращение. Но такую установку вполне по силам сделать даже человеку без особого опыта в самоделках. Для этого нужен неодимовый магнит, который можно найти в запчастях от компьютерной техники.
Свойства магнита удивительны. Одно из таких свойств отталкиваться одинаковыми полюсами используется в предметах, которые используются как поезда на магнитной подушке, забавные игрушки или основа для эффектных дизайн-объектов и др. Как сделать левитирующий объект на основе магнитов?
Магнитная левитация на видео
Левитация волчка над пятью точечными неодимовыми магнитами. Magnetic Levitation, magnétismo, magnetic experiment, truco magnética, moto perpetuo, amazing game. Занимательная физика.
Обсуждение
hawk
При вращении магнита присутствует левитация а если обороты магнита уменьшаются падает с орбиты… обоснуй этот эффект. Взаимодействие магнитных полей между магнитами это ясно но какая роль вращения. Можно переменным магнитным полем от катушек удерживать магнит в воздухе также.
pukla777
Просьба проработать тему – маховик генератор. Думаю она будет иметь полезное практичное применение. К тому же, оно у вас было очень давно снято в ролике, но очень мало и без информации.
RussiaPrezident
А что если:
Запустить этот волчок и каком нибудь кубе и создать там Вакуум, по идеи не будет сопротивления воздуха и он будет крутиться практически бесконечно! А если не него ещё и медь правильно накрутить и снимать энергию?
Евгений Петров
Читаю комментарии, удивлен, какая нитка!? Там все как есть магнитный волчок, ему задали мех. энергию и есть постоянное магнитное поле волчка при вращении которого вращается и магнитное поле, но главное как! В магнитах домены упакованы не равно распределено это технически не возможно поэтому сам магнит пассивный не может удержаться на магнитной подушке он уйдет на более сильную сторону где разница вообще мизерная, поэтому вращение поля не дает это сделать.
Вячеслав Субботин
Ещё идея, а что если светить лазером постоянно с одной стороны? Изменится ли время вращения волчка из-за давления света? Если взять сильный лазер, то может быть получится сделать, чтобы волчок вообще не останавливался.
Никто Неизвестный
Старая игрушка… я помню данный волчок и пластину под ним на ферритовых магнитах, на неодиме это уже скучно, причем нижний магнит основания представлял собой одну сплошную плиту, а не пять отдельных магнитов, только он был намагничен хитрым образом…
Алигарх Леопольд
Игорь Белецкий, можно сделать колпак на который будет приземляться волчёк, чтоб его не ловить. Можно ли к нему добавить вращающееся магнитное поле чтоб поддерживать вращение? к примеру если его магнитный стол вращать..
Тимур Аминев
А расскажите пожалуйста как магнитное поле Земли тормозит волчок? В смысле какие моменты сил направленные против вращения возникают и почему.
Александр Васильевич
Если сверху над магнитом (или снизу было бы вообще шикарно!) приделать катушку и подкручивать ею волчок, то получится некое подобие двигателя на магнитном подвесе. Вещь абсолютно бестолковая, но красивая. Крутиться будет пока источник питания не убрать))
Иван Петров
Ну это мы уже видели. Сделай так чтобы магнит левитировал без вращения! (и без опор и жидкого азота конечно).
Высокий эльф
Развод для двоечников, это можно было назвать левитацией, если магнит не надо было раскручивать. Сам магнит, что сверху, будет соскальзывать если ему не придать вращение.
Андрей Соломенников
А что если приделать на платформу огонь, а к гироскопу (Юле) пропеллеры, что бы вращалась пока горит огонь внизу. Не помню как называется двигатель, но суть его – вращение, так сказать, ротора при помощи тепла.
волжанин
Игорь,есть такая идея… У тебя на столе не равномерное магнитное поле,а если и волчок сделать из нескольких магнитиков, а стол раскрутить…Может и волчок не будет обороты терять… Как думаешь?..
Антон Симовских
Игорь Белецкий, разобрались в физике процесса? Почему левитация возможна лишь в динамике? Влияют ли на стабилизацию волчка токи фуко, в нем возникающие?
Простейшая установка с левитирующим объектом на магните

Для этого понадобятся: бокс от СД-дисков, один или два диска, много кольцевых магнитов и супер-клей. Приобрести любой магнит можно в китайском интернет-магазине.
Когда к вам придут ваши друзья в гости, они удивятся эффектной конструкции, которую вы создали сами.
Левитроном, как известно, называют волчок, вращающийся в воздухе над коробкой, в которой действует источник магнитного поля. Изготовить левитрон можно из популярного датчика холла.
Что такое левитрон
ВНИМАНИЕ! Найден совершенно простой способ сократить расход топлива! Не верите? Автомеханик с 15-летним стажем тоже не верил, пока не попробовал. А теперь он экономит на бензине 35 000 рублей в год!
Левитрон – это игрушка. Ее нет никакого смысла покупать, если знать варианты изготовления самодельного устройства. Ничего сложного в конструкции такого левитрона не будет, если имеется обычный датчик холла, например, купленный для автомобильного трамблера, и оставленный впрок.
Следует знать, что эффект левитации наблюдается всегда в достаточно узкой зоне. Такие реалии несколько ограничивают свободу действий умельцев, однако при приложении терпения и времени, можно всегда настроить левитрон качественно и эффективно. Он практически не будет падать или скакать.
Левитрон из датчика холла
Левитрон на датчик холла и идея его изготовления проста, как и все гениальное. Благодаря силе магнитного поля в воздух поднимается кусок любого материала с электромагнитными свойствами.

Чтобы создался эффект «зависания», парения в воздухе, подключение осуществляется с большой частотой. Другими словами, магнитное поле, как бы, поднимает и бросает материал.
Схема устройства чересчур проста, и даже школьник, не просидевший уроки физики зря, сможет все самостоятельно соорудить.
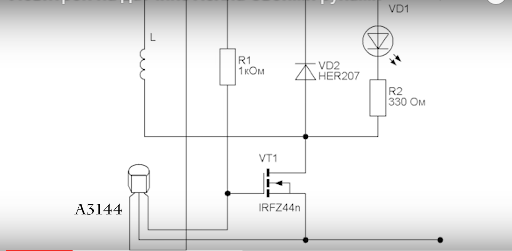
- Нужен светодиод (цвет его подбирается в зависимости от индивидуальных предпочтений).
- Транзисторы RFZ 44N (хотя подойдет любой полевик, близкий к этим параметрам).
- Диод 1N 4007.
- Резисторы на 1 кОм и 330 Ом.
- Собственно, сам датчик холла (А3144 или другой).
- Медный намоточный провод размером 0,3-0,4 мм (около 20 метров будет достаточно).
- Неодимовый магнитик в виде таблетки 5х1 мм.
- 5-вольтный зарядочник, предназначенный для мобильника.
Теперь подробно о том, как проводится сборка:
- Делается каркас для электромагнита точно с такими же параметрами, как на фото. 6 мм – диаметр, около 23 мм – длина намотки, 25 мм – диаметр щечек с запасом. Изготавливается каркас из картонки и обычного тетрадного листа, с использованием суперклея.

- Конец медного провода фиксируется на катушке, а затем проводится наматывание (примерно 550 витков). Неважно при этом в какую сторону наматывать. Другой конец провода тоже закрепляется, катушка пока откладывается в сторону.
- Паяем все по схеме.
- Датчик холла припаивается на проводки, а затем ставится на катушку. Надо вдеть его внутрь катушки, зафиксировать подручными средствами.
Внимание. Чувствительная зона датчика (определить ее можно по документации к датчику холла) должна смотреть параллельно земле. Поэтому, перед тем как вдеть датчик в катушку, рекомендуется немного согнуть это место.

- Катушка подвешивается, на нее подается питание через спаянную ранее плату. Катушка фиксируется посредством штатива.

Теперь можно проверить, как работает левитрон. Можно подвести к катушке снизу любой наэлектризованный материал. Он будет либо притягиваться катушкой, либо отталкиваться, в зависимости от полярности. Но нам нужно, чтобы материал зависал в воздухе, парил. Так оно и будет, если форма материала не слишком мала по отношению к катушке.
Примечание. Если магнит в виде таблетки маленький, то он будет левитировать не слишком эффектно. Может падать. Чтобы исключить огрехи в работе, надо сместить центр тяжести материала к низу – в качестве груза подойдет обычный кусок бумажки.
Что касается светодиода, то его можно и не ставить. С другой стороны, если хочется большего эффекта, можно организовать шоу с подсветкой.
Самодельный левитрон в классическом исполнении без датчика
Как видим, благодаря наличию датчика холла удалось изготовить вполне эффектную игрушку. Однако это вовсе не означает, что без датчика не обходится. Напротив, самодельный левитрон в классическом исполнении, это лишь большой магнит от динамика (диаметром 13-15 см) и маленький кольцевой магнит для волчка (2-3 см в диаметре), без использования датчика.
Ось волчка делается, как правило, из старой ручки или карандаша. Главное – стержень подбирается так, чтобы плотно заходил по центру кольцевого магнита. Лишняя часть ручки после этого срезается (примерно 10 см в длину вместе с закрепленным магнитом для волчка, то что надо).
Классическая схема изготовления левитрона подразумевает также наличие десятка различных шайб, вырезанных из плотной бумаги. Для чего они понадобятся? Если в вышеописанном случае тоже использовалась бумага, и как мы помним – для смещения центра тяжести вниз или проще, для настройки. То же самое и здесь. Шайбочки буду нужны для идеальной настройки волчка (при необходимости сажаются после кольцевого магнита на стержень).

Внимание. Чтобы самодельный волчок идеально левитировал, помимо настройки шайбочками, нужно не ошибиться с полярностью. Другими словами, установить кольцевой магнит соосно большому магниту.

Но и это еще не все. Как в первом случае (с использованием датчика холла), так и во втором, надо добиться идеальной ровности источника притяжения. Говоря иначе, поставить большой магнит на идеально ровную поверхность. Чтобы добиться этого, применяются деревянные подставки различной толщины. Если магнит сидит не ровно, подставки ставятся с одной стороны или с нескольких, таким образом, настраивается ровность.
Платформенные левитроны
Отличается платформенная схема левитрона, как правило, наличием не одного, а нескольких магнитов-источников. Парящий в воздухе материал или волчок будет стремиться в этом случае упасть на один из магнитов, сместившись с вертикальной оси. Чтобы этого избежать, надо суметь скорректировать центральную зону притяжения, и сделать это идеально точно.
И тут на помощь приходят те самые катушки, с вдетым внутрь датчиком холла. Пусть таких катушек будет две, и расположить их следует ровно по середине платформы, между магнитами. На схеме это будет выглядеть вот так (1 и 2 — магниты).

Из схемы становится понятно, что целью управления катушками является создание горизонтальной силы, центра притяжения. Сила эта формально названа Fss, и направлена она к оси равновесия при возникновении смещения, указанного на схеме, как Х.
Если подключить катушки так, чтобы импульс создавал зону с обратной полярностью, то можно решить вопрос со смещением. Это подтвердит любой физик.
В качестве корпуса для конструкции платформенного левитрона подбирается любой старый проигрыватель ДВД. Из него снимаются все «внутренности», устанавливаются магниты и катушки, а в целях красоты, верхняя часть закрывается практичной крышкой из тонкого, можно прозрачного материала (пропускающего магнитное поле).
Датчики холла должны выступать через отверстия платформы, должны быть распаяны на разогнутых ножках разъемов.
Что касается магнитов, то это могут быть круглые элементы толщиной в 4 мм. Желательно, чтобы один из магнитов был больше второго по диаметру. Например, 25 и 30 мм.
Существуют и более сложные варианты левитронов, изготовленные по схеме раскручивания волчка, находящегося внутри небольшого глобуса. Эти левитроны также могут строиться с использованием датчиков холла – эффективных составляющих, совершивших целую революцию в автопромышленности и других сферах человеческой деятельности.
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:
2.Фунциональная схема

Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
- Нет никакого магнита - индукция на торцах катушки одинакова - сигнал с датчиков одинаков - блок управления выдает минимальный сигнал - катушка работает на всю мощь;
- Близко поднесли магнит - индукция сильно разная - сигналы от датчиков сильно разные - блок управления выдает максимальный сигнал - катушка отключается совсем - магнит никто не держит и он начинает падать;
- Манит падает - отдаляется от катушки - разница сигналов с датчиков уменьшается - блок управления уменьшает выходной сигнал - ток через катушку увеличивается - увеличивается индукция катушки - магнит начинает притягиваться;
- Манит притягивается - приближается к катушке - разница сигналов с датчиков увеличивается - блок управления увеличивает выходной сигнал - ток через катушку уменьшается - уменьшается индукция катушки - магнит начинает падать;
- Чудо - магнит не падает и не притягивается - вернее, и падает и притягивается несколько тысяч раз в секунду - то есть возникает динамическое равновесие - магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.

4.Принципиальная схема

Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.



5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:




7. Дисклаймер
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.Получилось вот что:
2.Фунциональная схема

Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
- Нет никакого магнита - индукция на торцах катушки одинакова - сигнал с датчиков одинаков - блок управления выдает минимальный сигнал - катушка работает на всю мощь;
- Близко поднесли магнит - индукция сильно разная - сигналы от датчиков сильно разные - блок управления выдает максимальный сигнал - катушка отключается совсем - магнит никто не держит и он начинает падать;
- Манит падает - отдаляется от катушки - разница сигналов с датчиков уменьшается - блок управления уменьшает выходной сигнал - ток через катушку увеличивается - увеличивается индукция катушки - магнит начинает притягиваться;
- Манит притягивается - приближается к катушке - разница сигналов с датчиков увеличивается - блок управления увеличивает выходной сигнал - ток через катушку уменьшается - уменьшается индукция катушки - магнит начинает падать;
- Чудо - магнит не падает и не притягивается - вернее, и падает и притягивается несколько тысяч раз в секунду - то есть возникает динамическое равновесие - магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.

4.Принципиальная схема

Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.



5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:













Необычная Масленица: Цветные блины и торт из блинов с зеленым чаем
После маммопластики — что нельзя когда увеличила грудь Больно ли удалять дренаж после маммопластики
Нафтизин: инструкция по применению Можно ли нафтизин ребенку
Краткий пересказ романа Чарльза Диккенса «Приключения Оливера Твиста Краткая информация приключения оливера твиста
Академия мубинт входит в число эффективных вузов россии